




D² Harita Drone Tanıtım (RTK ve PPK)
09-10-2020
17:14
NASIL ÇALIŞIYOR?
RTK ve PPK
GNSS(GPS) uydularından alınan radyo navigasyon sinyallerinden konum üretilmesi süreci, önce 4 ayrı uydudan alınan sinyaller ile zaman senkronizasyonun yakalanması, ve senkronizasyonun ardından gelen sinyallerin varış süresinin hesaplanması, ve böylece mesafeye dönüştürülmesine dayalıdır. Dünya atmosferinin katmanlarından olan troposphere ve üzerinde yer alan ionosphere katmanları, bu sinyallerin yavaşlamasına neden olur. Gelen sinyallerin, SV (uydu) bazında ne kadar yavaşladığının tespiti ve bu düzeltmenin diğer civardaki diğer GNSS alıcılara tatbik edilmesi sonucunda, >50 cm düzeyindeki konum çözümü önce 2-50 cm düzeyine düşer böylece FLOAT konum üretilir, ardından, eğer sinyal çözümleri tutarlı ise <2 cm olarak FIX konum elde edilir. Bu sürecin anlık olarak canlı şekilde yapılması RTK’dır(Real Time Kinematics), bu sürecin kayıt edilen RINEX verileri ile sonradan bir bilgisayar ortamında yapılması ise PPK’dır(Post Processing Kinematics).
Drone Haritacılığında PPK’nın RTK’ya Olan Üstünlüğü
Haritacılık uygulamalarında, her ne kadar yüzey çalışmalarında RTK uygulaması bir standart olsa dahi, uçan platformlar için RTK yerine PPK tercih edilmelidir. RTK sürecinde yer alan zafiyet ve zorlukları şu şekilde sıralayabiliriz;
•Düzeltme verisinin paylaşımı için ek radyo iletişim tertibatının gerekliliği,
•İlave radyo iletişim tertibatının yer kontrol ve görüntü aktarım sinyalleri ile olası enterferansı,
•Haritaya konu sahanın genişliği nedeniyle sinyal kaybı ve/veya gecikmesi,
•Sinyal gecikmesi ile düzeltme yaşının artması, buna bağlı olarak hassasiyetin düşmesi,
•Hesaplama süresinin darlığı nedeniyle düzeltme işlemlerinin basite indirgenmesi ve neticesinde sahte FIX olasılığı,
•Konumlamanın sadece lineer interpolasyon ile temin edilebilmesi,
gibi olumsuzluklardan dolayı, uçan platformlarda haritacılık faaliyetleri için PPK doğru tercih olacaktır. Çünkü, PPK işleminde tüm çalışma bilgisayar ortamında, zaman gecikmesi ve veri kaybı olmaksızın işlemektedir. Ayrıca PPK'nın en güçlü yanı, veriyi ileri, geri ve çift yönlü olarak okuyabilmektir, böylece herhangi bir sahte FIX olasılığının bertaraf edilir ve düşük çözüm oranlarında dahi FIX elde edilebilmesini mümkün kılar.
GNSS Konumundan Resim Orta Konumunun Saptanması
GNSS alıcıları, frekans bağımsız olarak RTK veya PPK ile temin edilebilen FIX düzeyindeki konum bilgileri saniyenin 1:1 ile 1:14’ü (1-14Hz) arasında değişmektedir. Buna karşın, haritalama maksatlı elde edilen resimler ise saniyenin 1:160’ı ile 1:800 arasındadır. Aradaki kesir farkı interpolasyon ve ekstrapolasyon ile giderilmektedir. Unutulmamalıdır ki, Drone uçuş esnasında orta bir süratte saniyede 5 metre katetmektedir. Bu da 2 milisaniye de 1 cm demektir. Bu nedenle resim anının milisaniye hatta mikrosaniye düzeyinde yakalanması ve konum bilgilerinin bu zaman dilimine doğru projeksiyon edilmesi isabeti doğrudan etkiler.
Rüzgar ve Seyir Hızının Etkileri
Şiddeti fark etmeksizin rüzgar direncine karşı yapılan uçuşlarda sürat ve yön değişiklikleri, GNSS tarafından elde edilen konum bilgisinin resim orta noktasına projeksiyonunu zorlaştırmaktadır. Ayrıca rüzgar tarafından üretilen ivme ve konum(X,Y,Z) etkisi, aracın otomatik pilot tarafından açısal(φ,θ,ψ) değişimler ile dengelenmeye çalışılır. Bu etki ve tepkiler neticesinde aracın her 3 eksende de rotasyonu değişecektir, ve araç konumuna ilaveten GPS anteni ile kamera lensi arasındaki açı ve mesafe de gerçek konum bilgisini farklılaştıracaktır.
D²HaritaDrone ile RTK/PPK + Ataletsel Konumlama
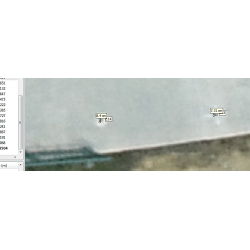
Bu bakımdan belirtilen hesaplamaları sunan ve projeksiyonu minimum hata ile üreten D²HaritaDrone donanımı ve yazılımı, sadece tek eksende (yarı yarıya daha az) uçarak gerçek cm hassasiyetinde konum üretmektedir. Aşağıda görüleceği üzere, piyasa geneline ait yöntemler ile temin edilen isabet >7 cm düzeyinden D²HaritaDrone çözümünde <3 cm düzeyine yükseltilmektedir.
Rakip/Piyasa Geneli RTK/PPK Konumlama yöntemi ile

D²HaritaDrone PPK + Ataletsel Konumlama yöntemi ile

Her iki resim de aynı uçuştan temin edilmiştir, fark yaratan unsur ise, PPK sonrası oluşan konumlamaların D²HaritaDrone yazılımı ile ikinci bir tarama ile rüzgar, ivme ve seyir yönü gibi etkenlerin hesaplanarak, oluşan sapmanın kuvvetli şekilde yatıştırılmasını sağlar. Bu kıyaslamayı pek çok farklı resim ile yapabilirsiniz ancak alınacak sonuç her defasında yukarıda beliren farkı yansıtacaktır.